現在行っている主な活動
9月中間発表前
水圧併用ジャバラ式ロボットハンドの設計・製作
親指です。
バルーン式ハンドの水圧バルーンの耐久性の低さを改善するため、
バルーンの代わりにジャバラを使用することにしました。
各関節に4個のベアリングを使用しているので滑らかに動作します。
第三関節のみに角度センサが付いていますが、完成品には全関節に付ける予定です。
ハンド完成予想図
水冷式水圧併用アクチュエータの小型化・改良
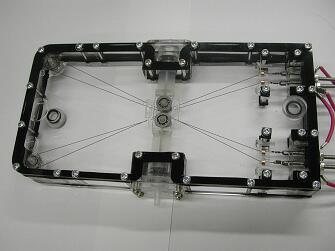
水冷式水圧併用アクチュエータの試作品です。
前年度のアクチュエータは装置全体を大きな水槽に入れ
冷却を行っていたため大きくなってしまったので
水を装置内に封入することで小型化を図ります。
リモートI/Oによるロボットハンドの制御

ロボットハンドの制御に使用する㈱コンテック製リモートI/Oです。
USBケーブルによってパソコンに接続します。
デジタル出力とアナログ入力のデバイスモジュールを接続してあり、
ロボットハンドのフィードバック制御を行うことができます。
これで約14万円しました。
制御全体図
戻る
|