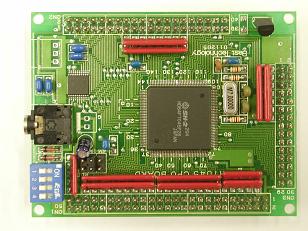
・SH2(マイコン)
多くの入力・出力端子を備え、現在の二足歩行ロボットの製作によく使われている。
BestTechnology社のGCCを使ってプログラムすることができ、サーボモーターの駆動に必要なPWM波を複数本、出力できる。

・リチウムポリマー電池
サーボモータを高トルクで駆動するために必要な7.4Vの電圧を得られる。
充電が可能で、小型・軽量なため、二足歩行ロボットに搭載する際に有効である。
2004年度の研究では使用する部品・機器を調べることから始まった。
・SH2(マイコン)
多くの入力・出力端子を備え、現在の二足歩行ロボットの製作によく使われている。
BestTechnology社のGCCを使ってプログラムすることができ、サーボモーターの駆動に必要なPWM波を複数本、出力できる。
・リチウムポリマー電池
サーボモータを高トルクで駆動するために必要な7.4Vの電圧を得られる。
充電が可能で、小型・軽量なため、二足歩行ロボットに搭載する際に有効である。