![]()
・研究目的
・ 本研究におけるロボットハンドの研究は動作形態が滑らかで、柔軟な材料であると共にパワーウェイトレシオ(出力重量比)が高い形状記憶合金(SMA:Shape Memory Alloy)を用いて、人間の手に匹敵する性能を有するロボットハンドの実現を目指しています。
・ 確実に動作するアクチュエータを開発し動作に差が無く、素早い動作が可能なロボットハンドの開発を目的としています。
・研究内容
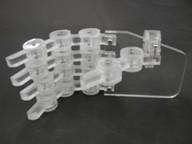
 ・空冷蛇管方式
・空冷蛇管方式
蛇管ワイヤがSMAアクチュエータの動力伝達を行うことにより間接を曲げます。
 ・水冷バルーン方式
・水冷バルーン方式
間接部にゴム製のバルーンを使用し、バルーンの膨張・収縮に よって間接が曲がります。
水槽にSMAアクチュエータを入れ、アクチュエータが水を押し出すことにより水圧がバルーンに加わり関節が曲がります。
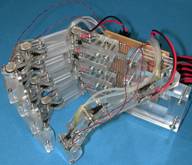 ・水冷蛇管方式
・水冷蛇管方式
SMAアクチュエータを密閉構造とし、その内部に水を満たす ことにより、水冷します。
間接部には蛇管を使用し、アクチュエータからの水圧を受け
て、蛇管が伸び縮みすることにより間接が曲がります。
・研究の面白いところ
本研究の面白いところは、人間の手のようなものを作れるというところと、形状記憶合金などを使って、機構を考え、製作し、動いたときなどが面白いところです。
・これからの研究目標
ハンドは、より自由度の高く関節がよく曲がり、握力がより強いもの、アクチュエータはよりコンパクトで分解・組み立てが簡易なものを目指します。
![]()