![]()
①研究目的
自立型ロボットの定義をすべて満たしているマイクロクリッパ競技を主体として、将来の発展性を見越し、従来の二輪駆動型ではなく二足歩行型マイクロクリッパを設計・開発していくことを目的としています。
②研究内容
本研究では、マイクロクリッパーロボットを開発するにあたって、車輪を使用した走行方法ではなく、二足歩行を主体としたロボットの研究開発を行なっています。このことは、後のヒューマノイドロボット研究の足がけにもなるとても貴重な研究です。また、本研究では二足の歩行ロボットに缶や迷路探査など簡単な動作を行わせる動作を加えることにより、ヒューマノイドロボットの研究と両立した二足歩行マイクロロボットの研究開発を行なっています。
③面白いところ
・二足歩行ロボットを、自分達の手で設計開発できるところです。
・二足歩行や迷路探査などのプログラムに自らの考えやオリジナリティーが直接反映されることです。
・みんなでわいわいがやがや話しながら研究開発できることです。
④今後の目標
・
マイクロメカニズムコンテストのマイクロクリッパー大会に出場し、入賞することです。
・
等身大のヒューマノイドロボットを研究開発するための基礎研究をすることです。
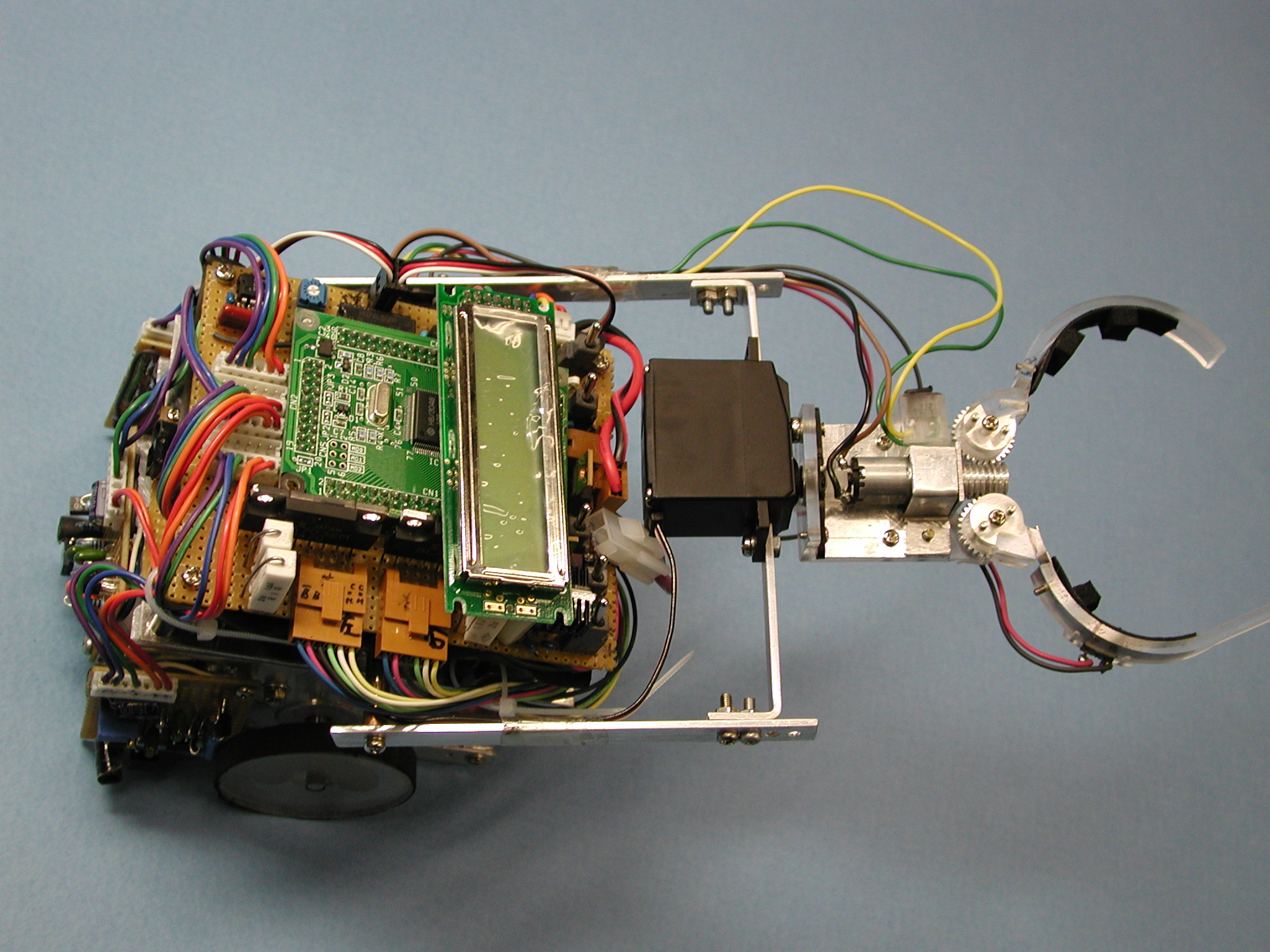
二輪型マイクロクリッパー 2003年モデル
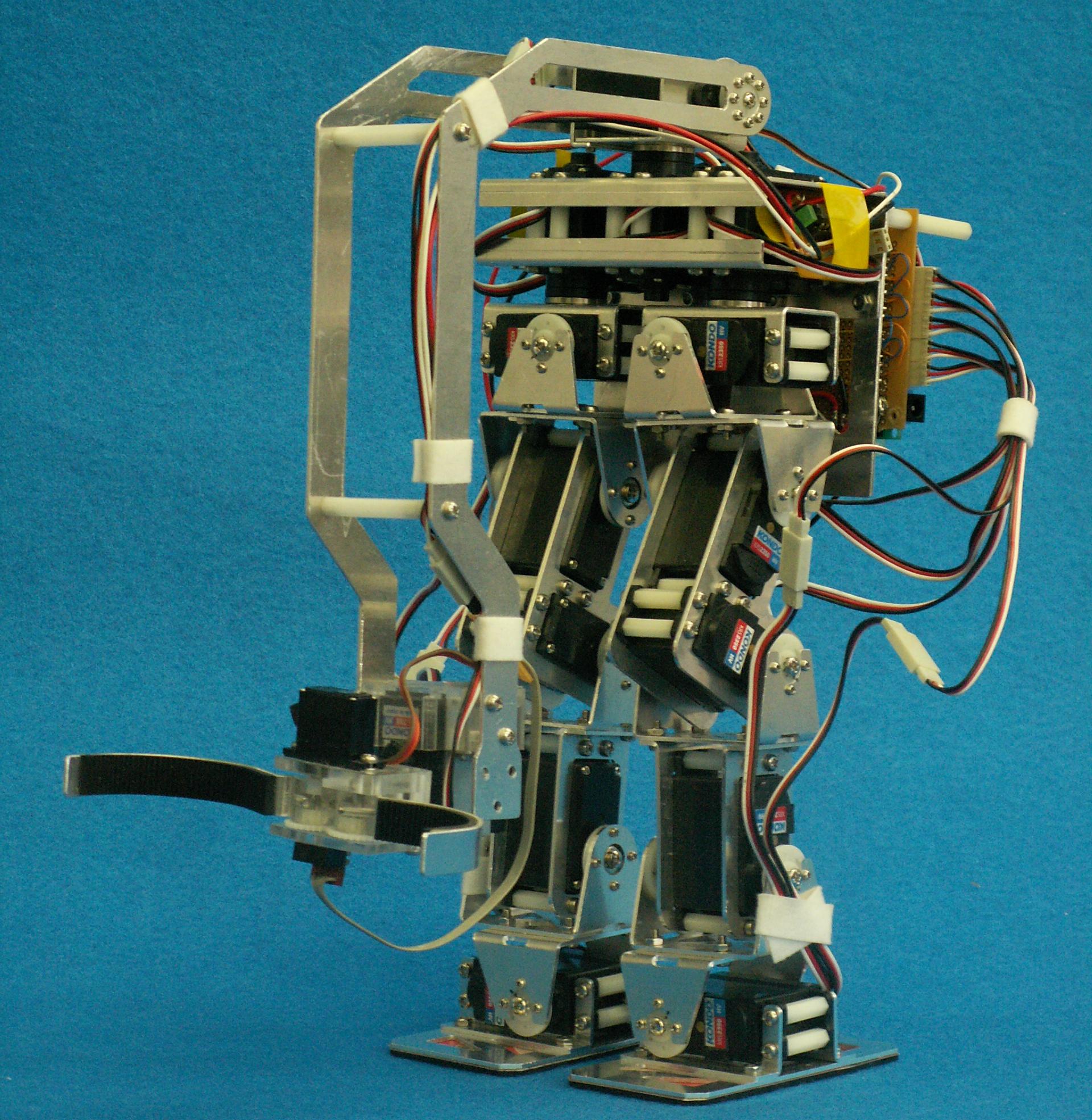
二足歩行マイクロクリッパー 2006年モデル
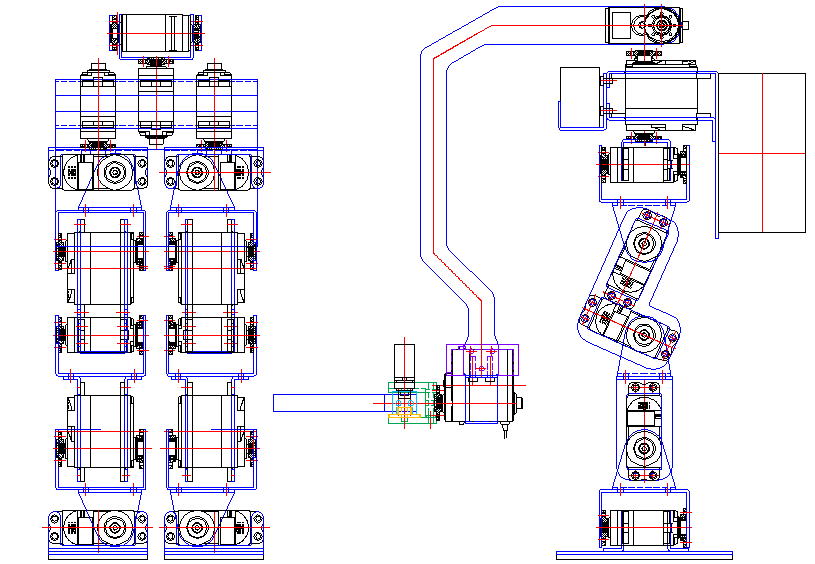
二足歩行マイクロクリッパー 2006年モデル 設計図
![]()